Fonctionnement des capteurs de sol :

Thymio peut déterminer s’il y a un sol devant lui.
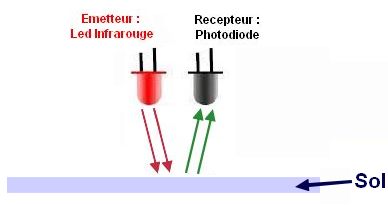
Le capteur de proximité émet une lumière infrarouge. Si le sol est clair, il réfléchit cette lumière.
On peut ainsi déterminer si il y a un sol et aussi détecter une ligne noire.
Exercice 1 : Détecter si il y a un sol devant Thymio et s’arrêter
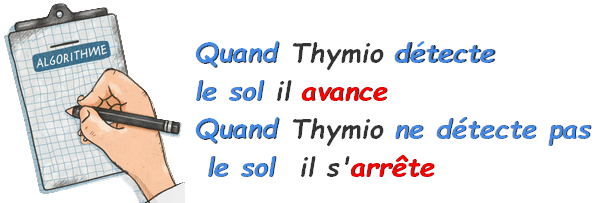
Étape 1 - L’algorithme :
On commence par lister en francais ce que doit faire le robot :
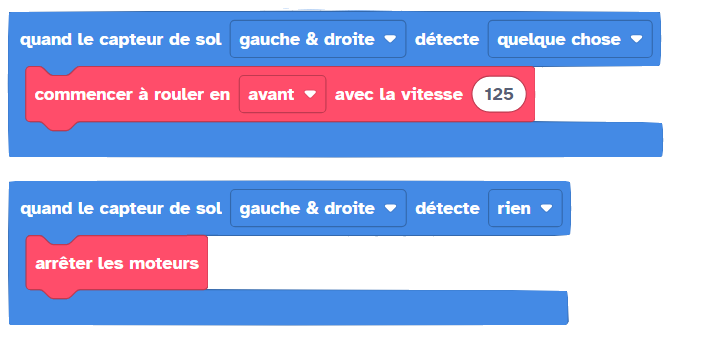
Étape 2 - La programmation :
On traduit l’algorithme en programme :
Exercice 2 : Détecter si il y a un sol devant Thymio, s’arrêter, reculer et faire demi-tour.
On va améliorer le programme précédent pour que Thymio recule et fasse demi-tour
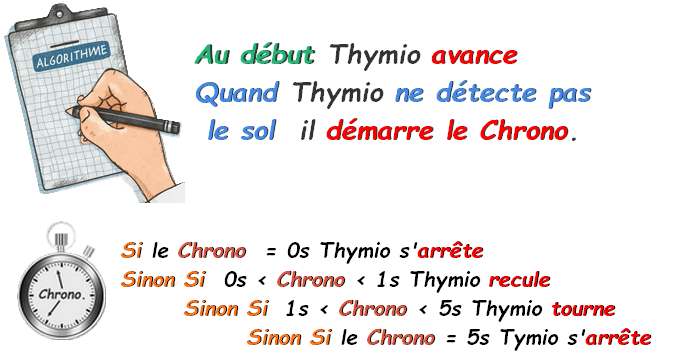
Étape 1 - L’algorithme :
On commence par lister en francais ce que doit faire le robot :
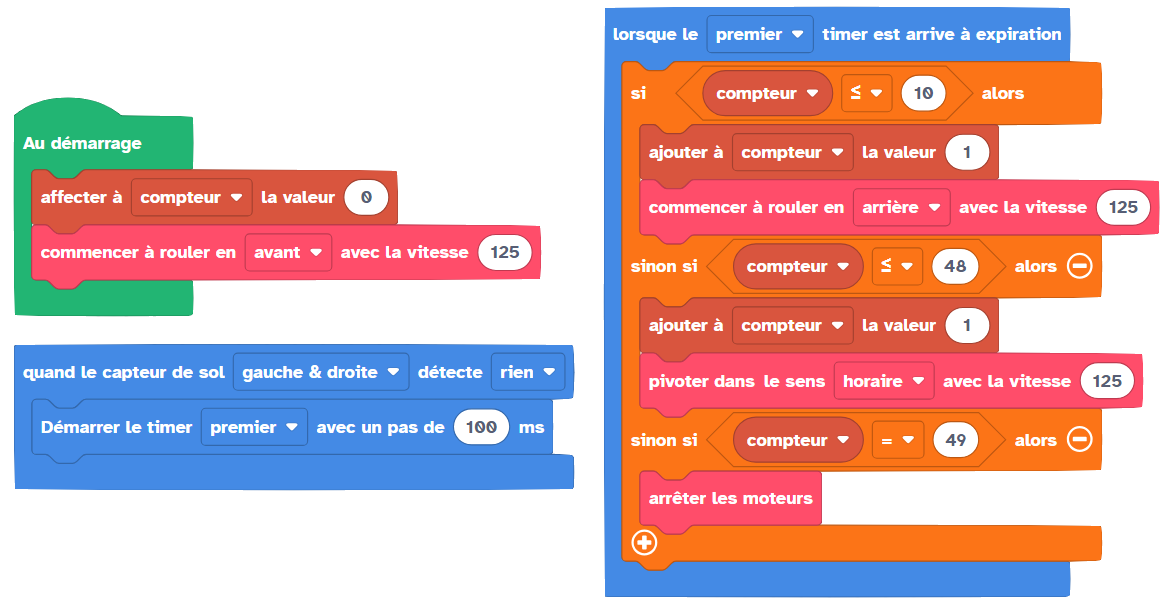
Étape 2 - La programmation :
On traduit l’algorithme en programme :
Fonctionnement des capteurs de sol :
En utilisant les 2 capteurs de sol Thymio peut suivre une ligne Noire.
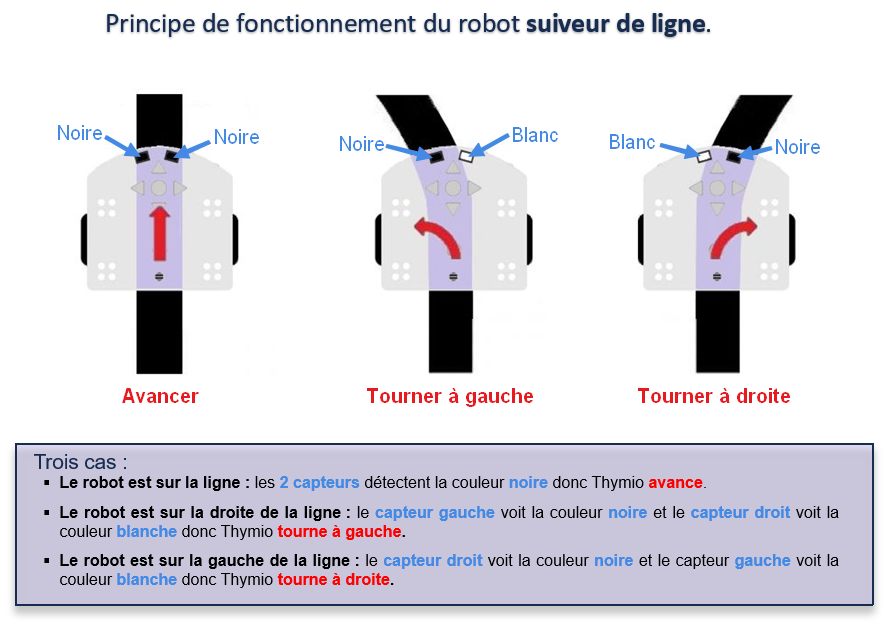
Exercice 1 : Suivre une ligne Noire
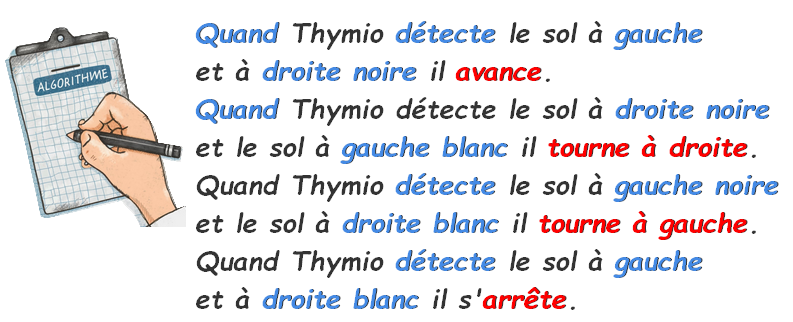
Étape 1 - L’algorithme :
On commence par lister en francais ce que doit faire le robot :
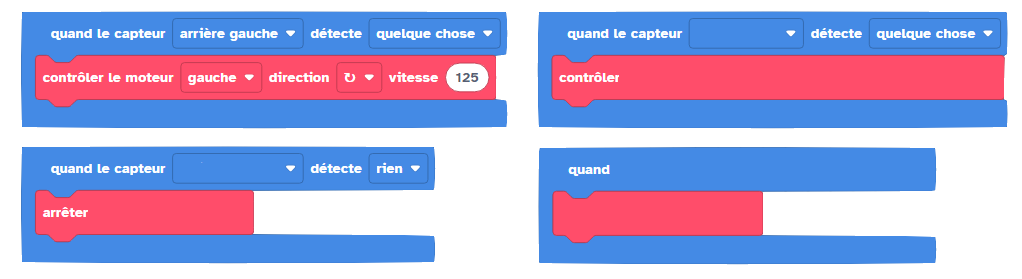
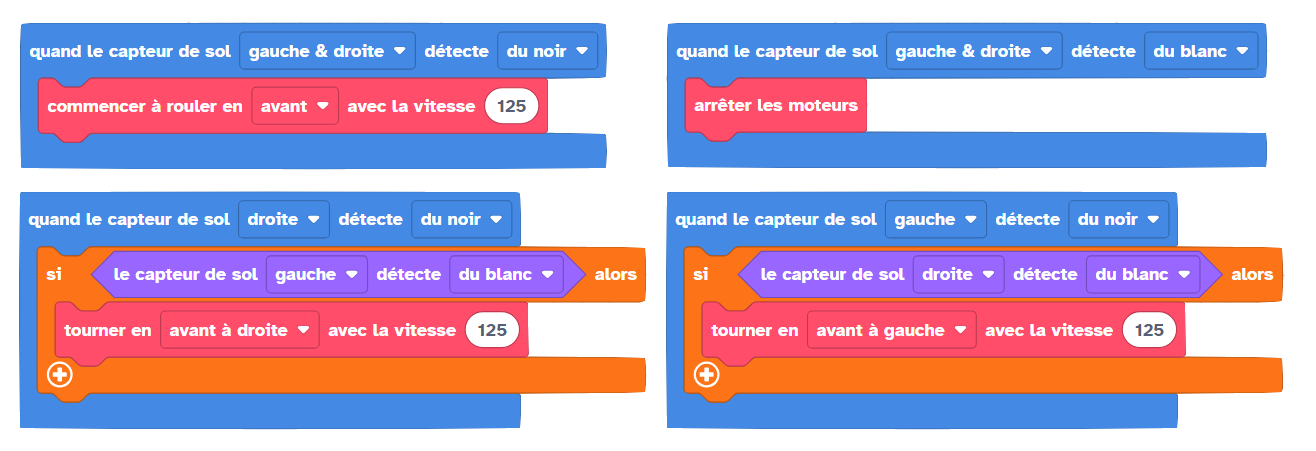
Étape 2 - La programmation :
Exercice 2 : Suivre une ligne Noire, faire demi-tour et suivre à nouveau la ligne
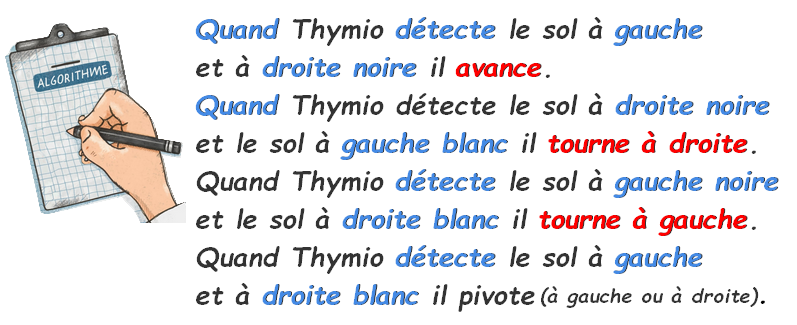
Étape 1 - L’algorithme :
On commence par lister en francais ce que doit faire le robot :
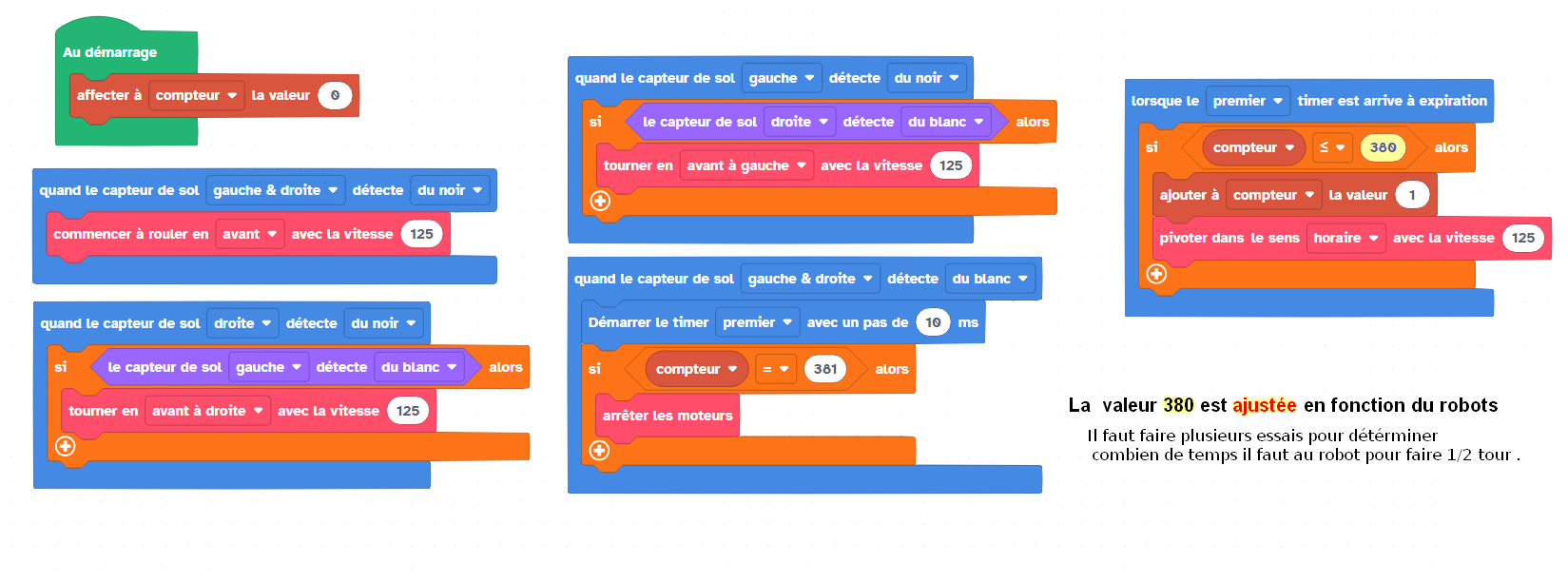
Étape 2 - La programmation :

Exercice 3 : Suivre une ligne Noire, faire demi-tour, suivre à nouveau la ligne puis s’arrêter
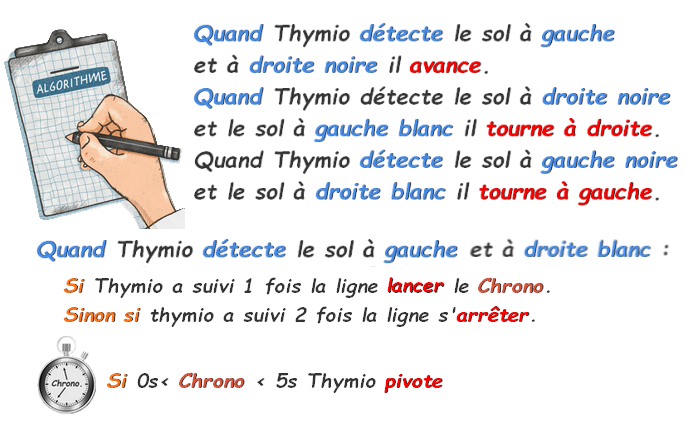
Étape 1 - L’algorithme :
On commence par lister en francais ce que doit faire le robot :
Étape 2 - La programmation :