Fonctionnement des capteurs de proximité :
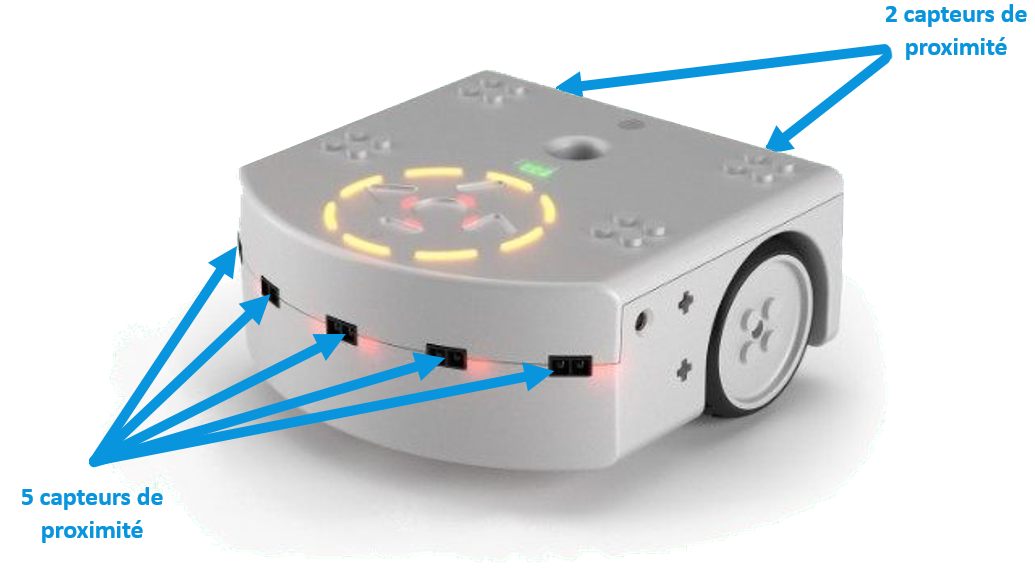
Thymio peut mesurer la distance à un obstacle situé devant ou derrière lui.
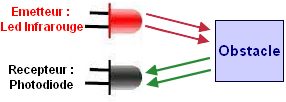
Le capteur de proximité émet une lumière infrarouge. Si un objet est aligné avec le capteur, il réfléchit cette lumière.
La distance est déterminée en mesurant la quantité de lumière réfléchie.
Exercice 1 : Détecter un obstacle devant Thymio et s’arrêter
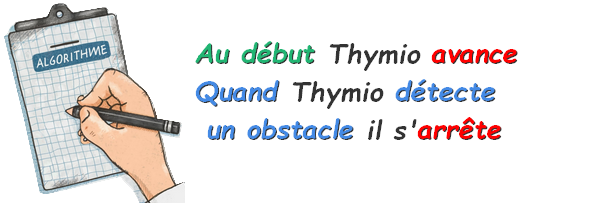
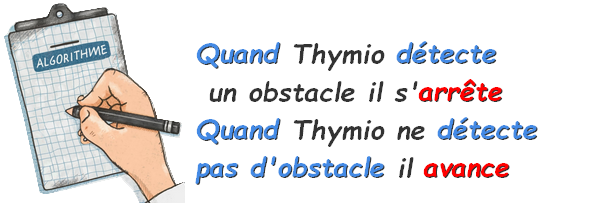
Étape 1 - L’algorithme :
On commence par lister en francais ce que doit faire le robot :
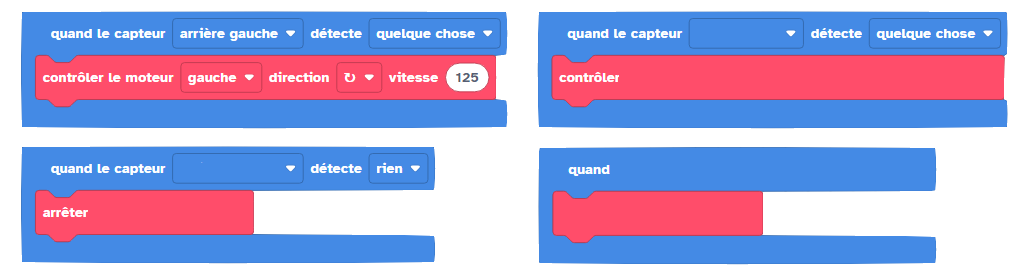
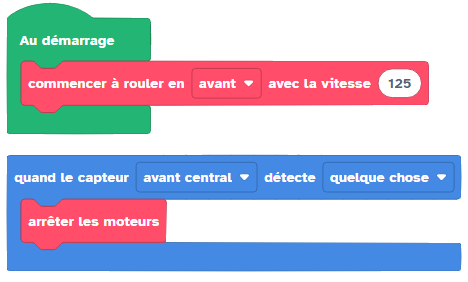
Étape 2 - La programmation :
On traduit l’algorithme en programme :
Exercice 2 : Détecter un obstacle devant Thymio et redémarrer quand il n’y plus d’obstacle
On va améliorer le programme précédent pour que Thymio redémarre quand on enlève l’obstacle
Étape 1 - L’algorithme :
On commence par lister en francais ce que doit faire le robot :
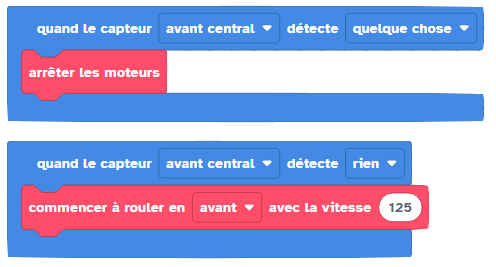
Étape 2 - La programmation :
On traduit l’algorithme en programme :
Exercice 3 : Pousser et diriger Thymio sans le toucher
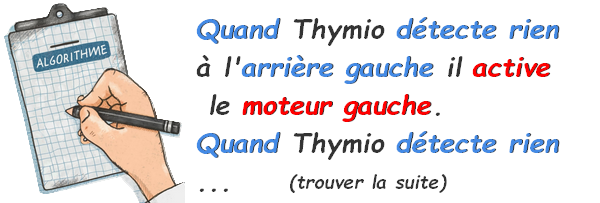
Étape 1 - L’algorithme :
On commence par lister en francais ce que doit faire le robot :
Étape 2 - La programmation :
On traduit l’algorithme en programme :